CloudCompare
で点群レーザのデータを、ジオラマ作成で何とかスムーズにして
3Dプリンタのデータとしたい
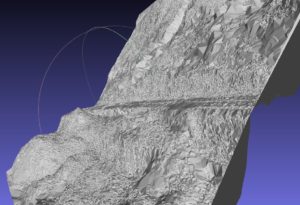
Meshlab
を使うのが一番効果的でした。
Filters>Smoothing,Fairing and Deformation >
Laplacian Smooth を選択
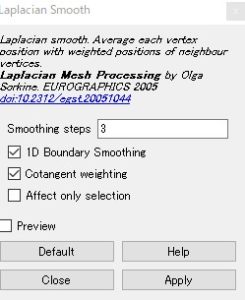
数値は、10でほぼスムーズに
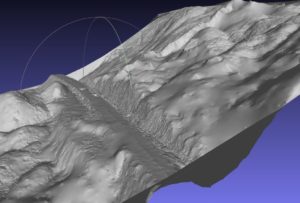

CloudCompare
で点群レーザのデータを、ジオラマ作成で何とかスムーズにして
3Dプリンタのデータとしたい
Meshlab
を使うのが一番効果的でした。
Filters>Smoothing,Fairing and Deformation >
Laplacian Smooth を選択
数値は、10でほぼスムーズに
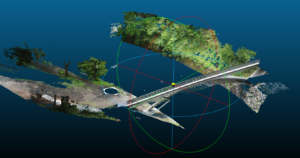
cloudcompareで色々やってほぼいい感じだけど、最終的なのは点群の正規化
本来点群は、物体を点で構成しているかと思う。シロート考え^_^
その集合体の点毎に、位相を加味すれば精度が上がるはず。
そこで点群データを、読み書きできればほぼそれは可能
良いライブラリがまたあるんですね。
LASzip LiDAR compressorと言われる物
フィンランド国土調査の公開により、5.3テラバイトのLASファイルを圧縮のわずか0.8テラバイトのLAZファイルにできる代物。
https://rapidlasso.com/laszip/
C,c++のソースver3.2.1
https://github.com/LASzip/LASzip
その上、ver2.1まではLASzip.Net is open-source and is licensed with the standard LGPL version 2.1 (see LICENSE file).
ソフトウェアは、商品性や特定目的への適合性の黙示的保証を伴わずに、いかなる保証もなく配布されます。
なので利用できる。本当に感謝です。
現在は、3.2だけど、2.1でも十分利用できる。
IMUセンサーによる位置精度を求めたくて覚え書き
周波数の値f(Hz)とした場合、1周期の時間t(ms)
t=1000/f
これでミリ秒が得られるのでざっくりざっくり計算できる。